
AlliomPickingはデジタル環境を活用し、与えられたハンドで
どのようにワークをつかめばよいかを学習します。
短時間でピッキング作業に適用できるAIモデルを作成し、
変種変量生産における段取り替えを容易にします。
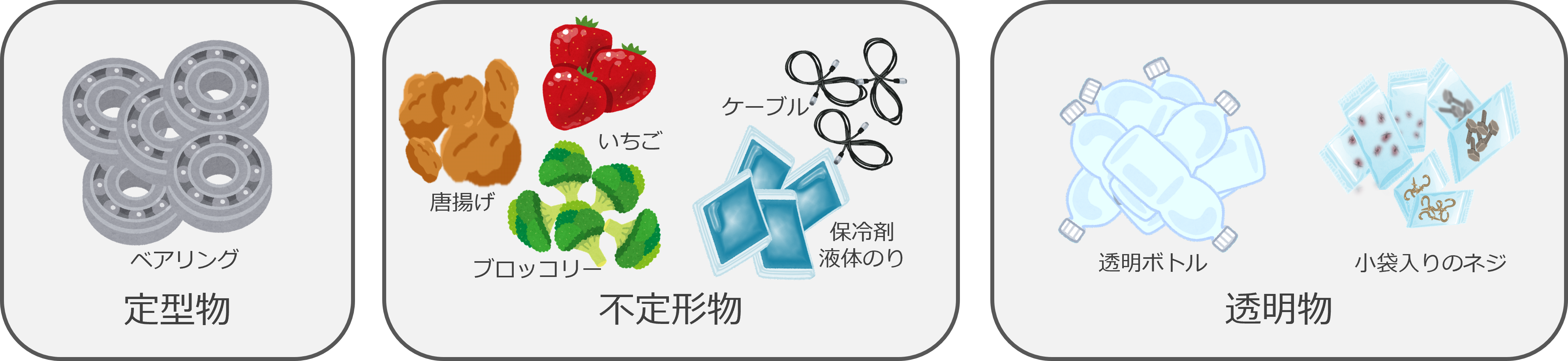
従来の3Dビジョンシステムでは対応が難しかった不定形物にも対応可能です。
AlliomPickingには、
お客様自身でAIモデルを開発できるAlliomPicking Studioと、
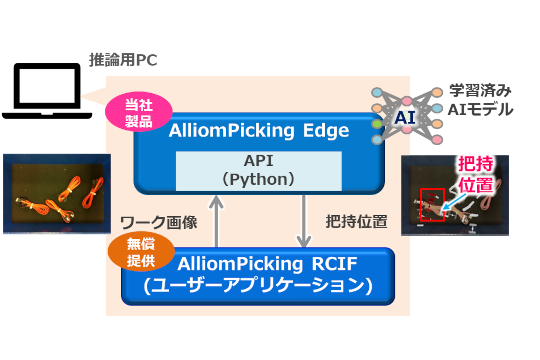
開発したAIモデルを現場で実行するためのAlliomPicking Edgeと、
現場への導入を簡単にするAlliomPicking RCIFがあります。
AIを使うとワーク(ピッキング対象物)の特徴を自ら学習することができます。
バラ積み画像から、形状のマッチング手法よりも柔軟にワークの特徴を見つけ出すことができるので、不定形物や透明物の認識が可能となります。
従来の形状のマッチング手法ではできなかったワークにも対応できますので、バラ積みピッキングの適用領域が拡大します。
AlliomPickingにご興味をお持ちですか?
お気軽にお気軽にお問合せください。
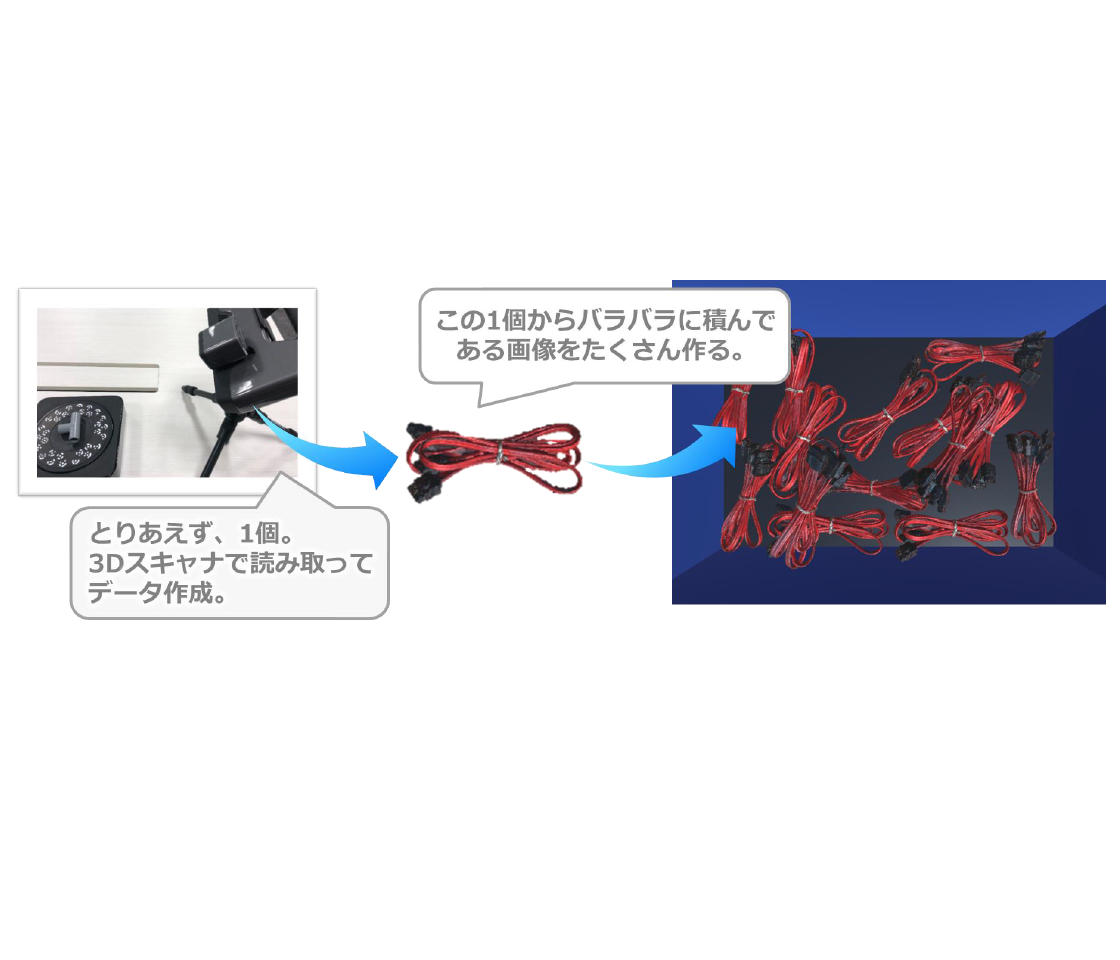
ピッキング用のAIモデルを生成するにはたくさんの学習用の画像データとそれを使った学習が必要です。
AlliomPicking Studioを使えばPC(シミュレータ)上で大量の画像を自動生成し、AIモデルの学習ができます。
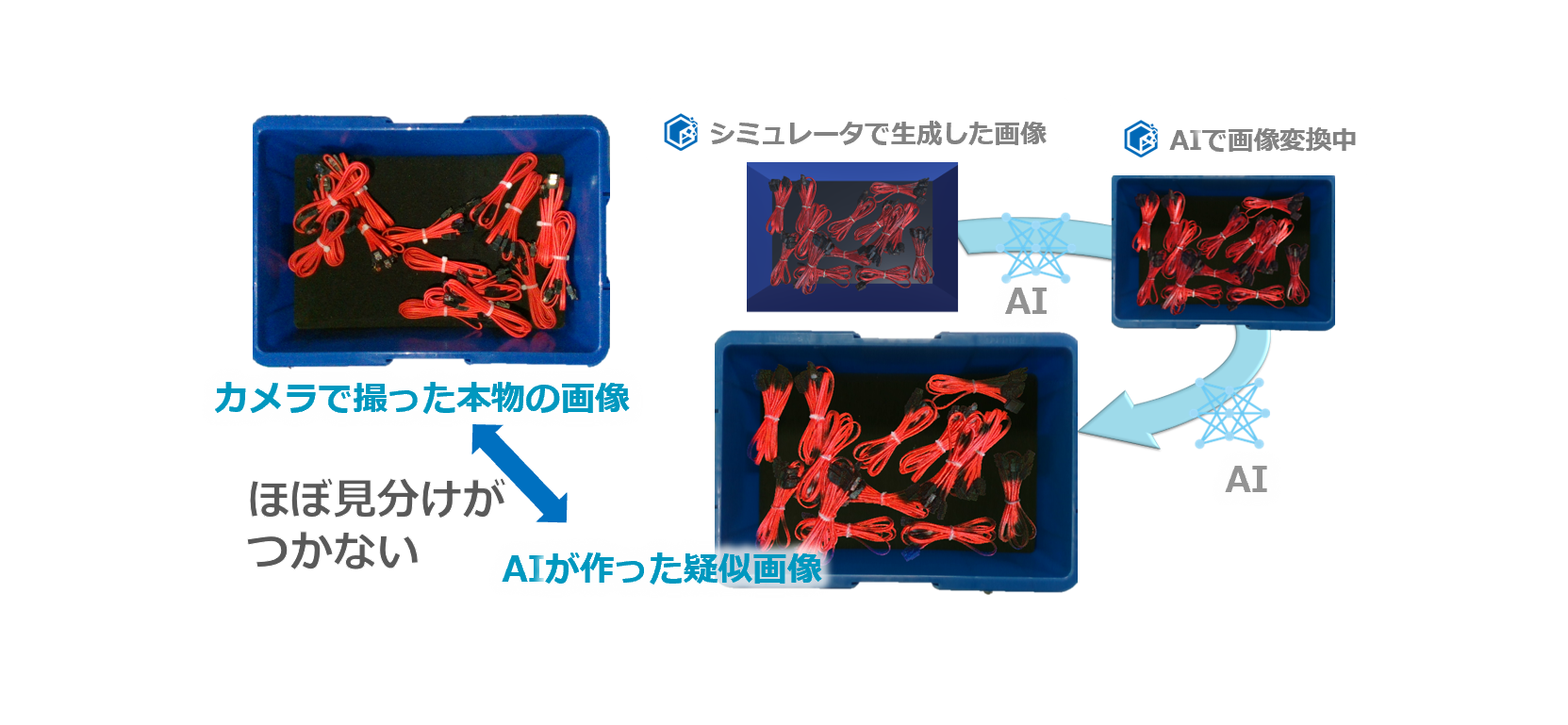
AlliomPicking Studioではシミュレータ上で大量に自動生成した画像に対して、Deep Learningを使ってリアルな画像に近づけるという処理を行います。そのリアルな画像を学習しているので実機投入時の精度も非常に高い結果が出ています。
AlliomPickingの技術は、吸着はもちろん把持によるピッキングでも高い精度を実現できます。
ピッキング時のワーク(対象物)の見た目の判断
色味や大きさ等の見た目を判断してピッキングする or しないを決めることができます。つまり、人がやっているのと同じようにNG品をピッキングの対象から除外することもできます。
二指ハンドによる安定した把持を実現
当社独自の解析アルゴリズムで最適な把持位置を導き出すことができます。ロボットによるピッキングで高精度の把持を実現できます。
把持位置の指定が可能
専用UIでの簡単な操作でワークの把持可能位置を設定できます。把持可能な位置だけを把持するように学習します。
※当社独自のアルゴリズムで最適な把持位置を導き出します。
 ※当社独自のアルゴリズムで最適な把持位置を導き出します。
※当社独自のアルゴリズムで最適な把持位置を導き出します。
AlliomPicking Studioはプログラミング不要。
AIモデルの作成は簡単な画面操作でお客様ご自身で行うことができます。
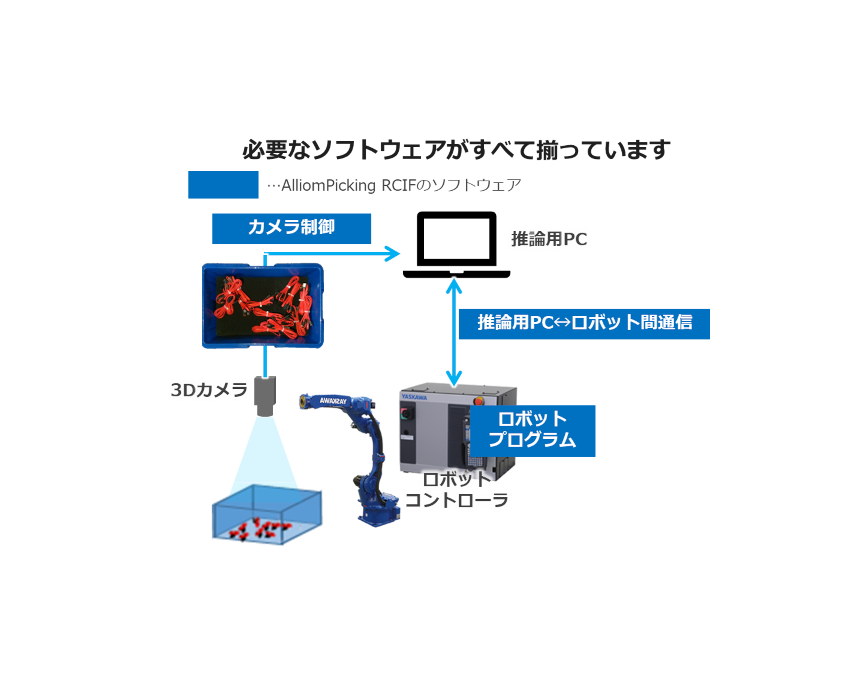
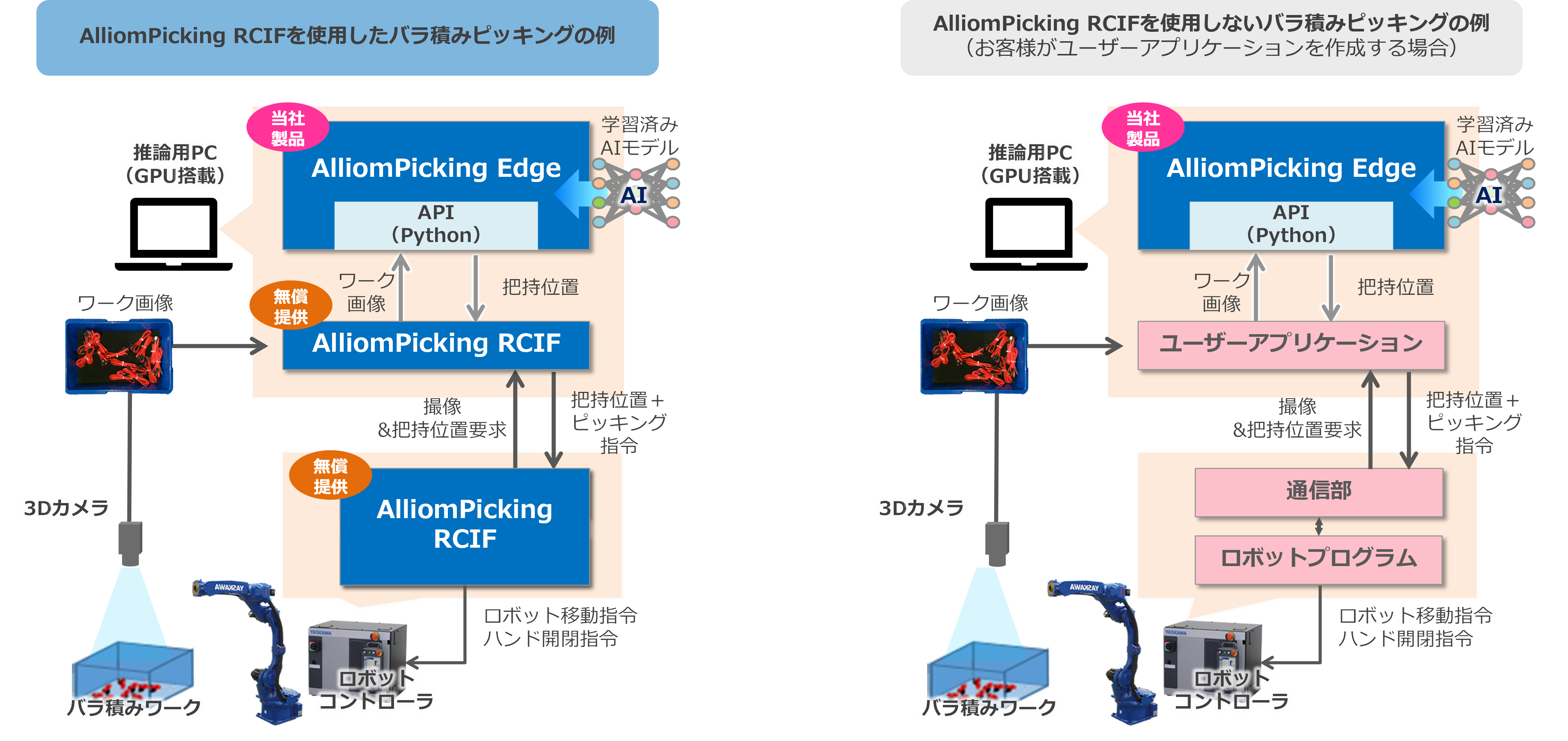
バラ積みピッキングに必要なロボットやカメラを動作させるための専用ソフトウェア”AlliomPicking RCIF※”を準備しております。
お客様が開発するのはAIモデルのみです。
※ロボットは安川電機製ロボットに対応しています。カメラについてはご相談ください。
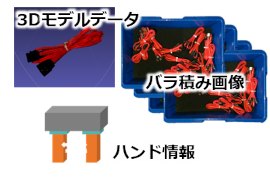
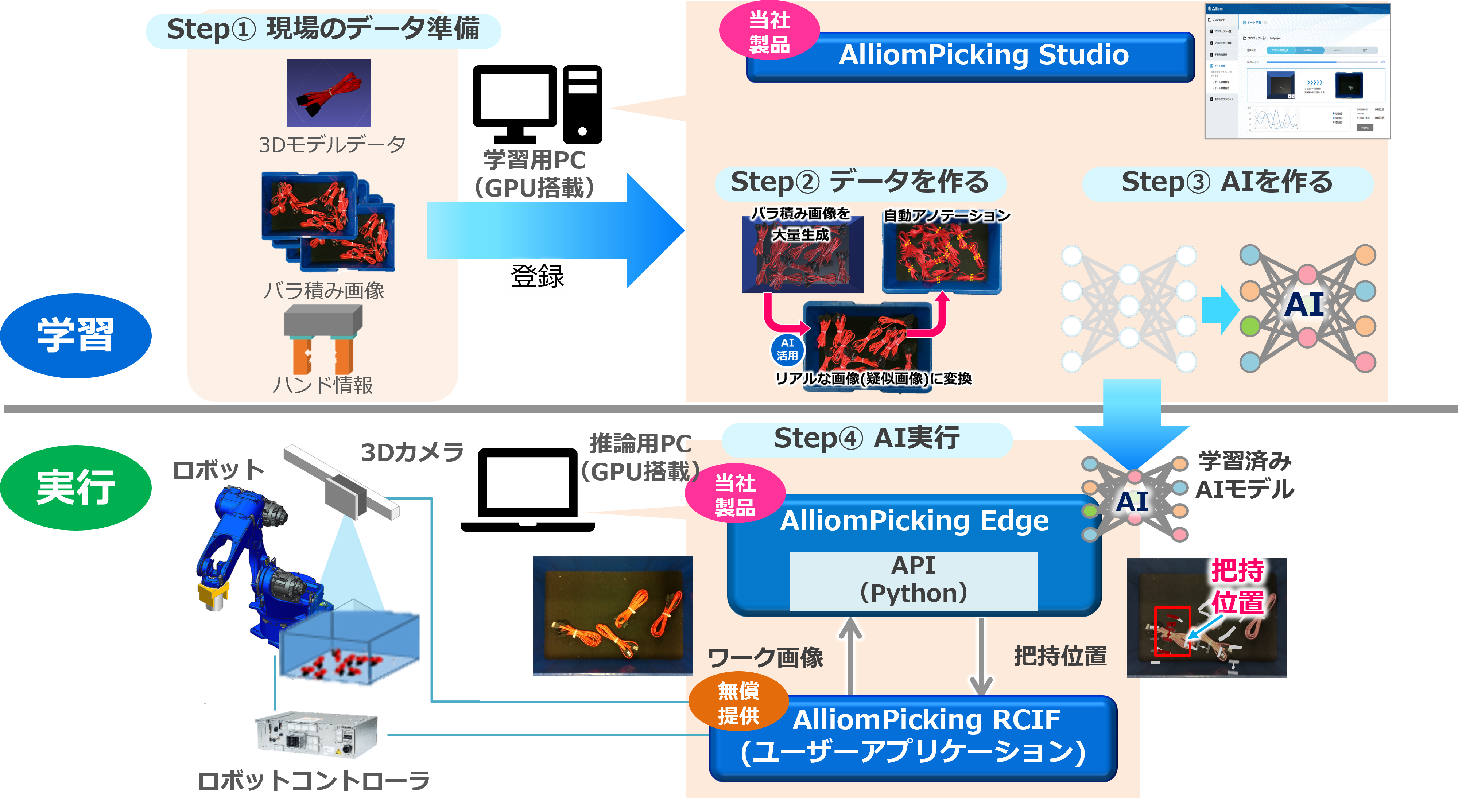
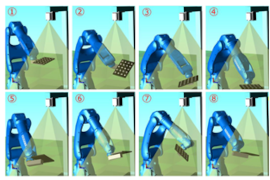
STEP①
現場のデータ準備
ピッキングしたいワークの3Dモデルデータ、少量のバラ積み画像を準備し、ハンド情報とともにAlliomPicking Studioに登録します。
3Dモデルデータは、3Dスキャナやスマホアプリを使用して作成します。(CADデータ等の3Dモデルデータがある場合はそれを使用することが可能です。)
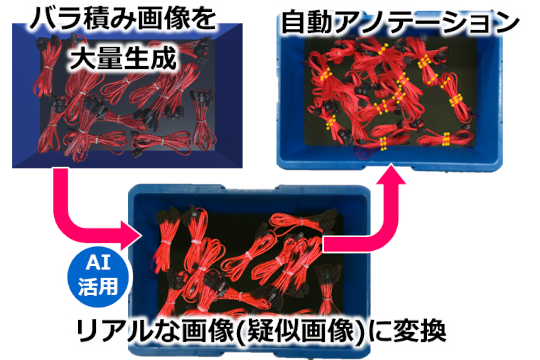
STEP②
データを作る
AlliomPicking Studioのシミュレータ上で大量のバラ積み画像を生成し、AIを使って学習に使用するリアルな画像に変換します。
変換した画像に対してAlliomPicking Studioがアノテーションを自動で行い、学習データを生成します。
STEP③
AIを作る
学習データを用いて把持位置・吸着位置を検出するAIモデルを作成します。
STEP④
AI実行
作成したAIモデルを現場の推論用PC内のAlliomPicking Edgeで実行します。
バラ積みピッキングに必要なロボットやカメラを動作させるための専用ソフトウェア”AlliomPicking RCIF”を準備しておりますので、お客様が開発するのはAIモデルのみです。
AlliomPicking EdgeはAIモデルを実行するためのインターフェース(Python※ API)を提供していますので、既存のシステムやカメラと連携させるなど、お客様がご自由にユーザーアプリケーションを作成することもできます。
※ Pythonは、Python Software Foundationの商標または登録商標です。
AlliomPickingにご興味をお持ちですか?
お気軽にお問合せください。
バラ積みピッキングに必要なロボットやカメラを動作させるための専用ソフトウェア”AlliomPicking RCIF※”を準備しております。
お客様が開発するのはAIモデルのみです。
これらの機能は実行ファイル、ソースコードの両方を提供しますので、カメラの変更や機能追加等をお客様で自由にカスタマイズ可能です。
AlliomPicking RCIFはAlliomPicking Edgeをご購入のお客様に無償で提供しております。
※ロボットは安川電機製ロボットに対応しています。対応カメラについてはご相談ください。
ピッキング時、学習用データ取得時に使用するカメラやロボットコントローラの接続を設定します。また環境に応じてカメラの露光時間を設定します。
専用キャリブレーションマーカを使用してロボット姿勢を10点登録して、カメラの座標系とロボットの座標系との相対関係を算出します。固定カメラ・オンハンドカメラに対応しています。

AlliomPicking Studioの学習に使う画像を簡単に取得できます。ファイル名、フォルダ構成等AlliomPicking Studioに適した形で保存されますので、そのままAlliomPicking Studioに入力することができます。

AlliomPicking Studioで学習したAIモデルを登録します。登録したAIモデルに応じたカメラの露光時間を設定することもできます。AIモデルは最大256種類を登録可能です。
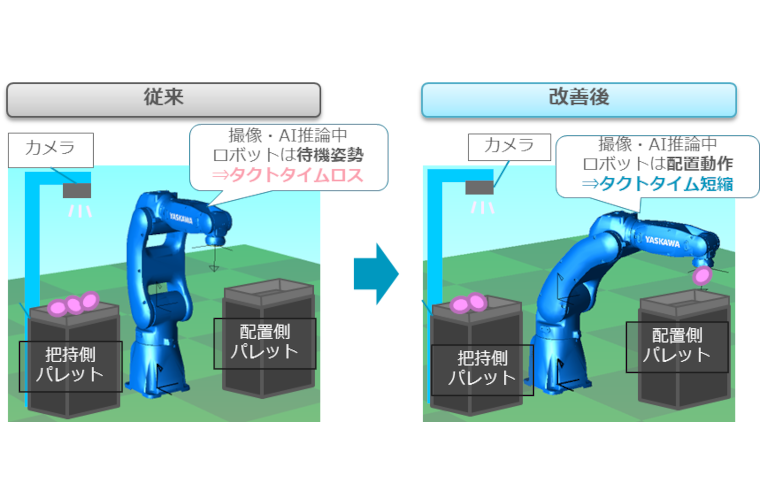
固定カメラを使用したバラ積みピッキングシステムにおいて、ロボットがワークをピッキングしてからプレイシングしている間に、ワークの撮像と次にピッキングするワークの把持位置を検出します。これにより、タクトタイムが短縮できます。
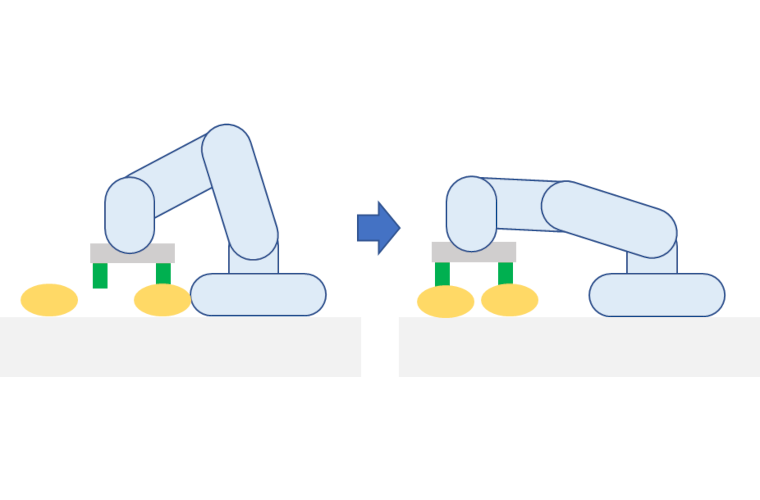
1回の撮像と1回のAIによるワークの把持位置検出で、同時に2個のワークをピッキングできます。
ロボットの動作時間、撮像回数とAIによる検出回数を減らすことでタクトタイムが短縮できます。
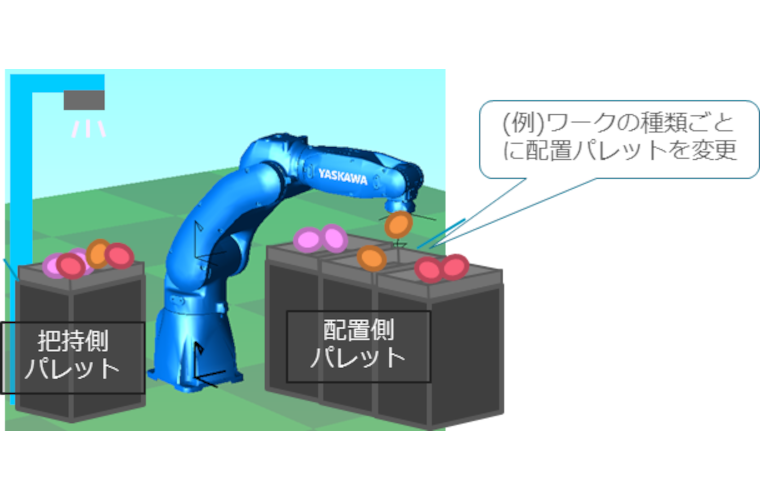
ピッキングするワークの状態(種類や表・裏などの向き)を認識し、状態毎に配置動作をカスタマイズすることができます。
例えば、ワークの表裏の向きを認識してピッキングし、ワークの表裏の向きに応じた場所へプレイシングすることができます。
| AlliomPicking Studio (AIモデル開発用PC) |
AlliomPicking Edge (AIモデル実行用PC) |
||
| 必要動作環境 | 推奨動作環境 | 必要動作環境 | |
| OS | Windows 11 64bit※1 Windows Server 2022 64bit※1 |
Windows 11 64bit※2 | |
| CPU | 第7世代以降のIntel Core プロセッサー、もしくは同等以上の性能を持つCPU | 第7世代以降のIntel Core プロセッサー、もしくは同等以上の性能を持つCPU | |
| CPU メモリ | 32GB 以上 | 16GB 以上 | |
| GPU | NVIDIA製GPU(VRAM 11GB以上,CUDA12.8動作要件を満たすもの) NVIDIA グラフィックスドライバ バージョン 570.65 以上 |
NVIDIA製GPU(VRAM 24GB以上,CUDA12.8動作要件を満たすもの) NVIDIA グラフィックスドライバ バージョン 570.65 以上 |
NVIDIA製GPU(VRAM 4GB以上,CUDA11.8動作要件を満たすもの) NVIDIA グラフィックスドライバ バージョン 520.06 以上 |
| ストレージ空き容量 | 20GB以上 | 100GB以上 | 5GB以上 |
STEP①
お問い合わせ
AlliomPickingについてご興味がございましたら、
お気軽にお問い合わせフォームよりお問い合わせください。

STEP②
ご提案
お客様のご要望をヒアリングさせていただき、実現に向けた進め方をご提案します。

STEP③
検証フェーズ1
AlliomPickingで作ったAI モデルの性能を検証し、実現可否を判断します。
(検証用データのご提供をお願いする場合があります。)
STEP④
検証フェーズ2
導入を想定した検証環境を準備し、導入の可否判断のための検証を実施します。

STEP⑤
導入
お客様の設備としてご活用ください。

弊社製品・サービスに関するご質問、ご相談、お問い合わせなど、
お気軽にご連絡ください。担当者より折り返しご連絡いたします。